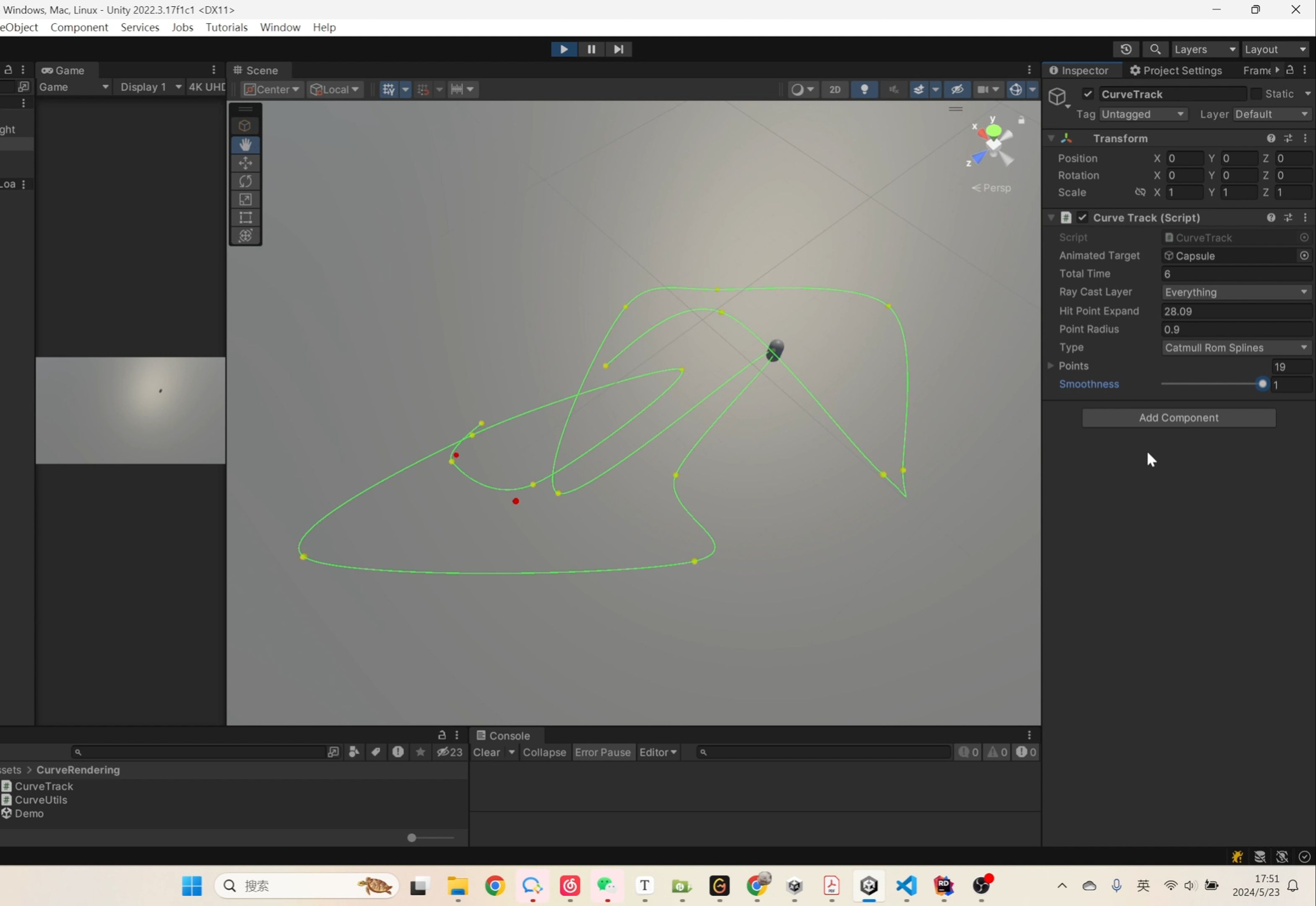
Catmull-Rom样条曲线在Python中主要通过scipy.interpolate或自定义算法实现,它能生成经过所有控制点的平滑路径,是计算机图形学和游戏开发中处理角色移动轨迹的首选方案。
在计算机图形学领域,让物体沿着一条既平滑又精确经过关键点的曲线运动,一直是个技术难点,早期的线性插值虽然计算简单,但生成的路径充满棱角,缺乏自然感;而贝塞尔曲线虽然优雅,却无法保证曲线经过特定的控制点,这在需要精确路径规划的场景中显得力不从心,Catmull-Rom样条曲线应运而生,它完美平衡了这两者:它既像贝塞尔曲线一样平滑连续,又像线性插值一样严格经过每一个给定的控制点,对于Python开发者而言,掌握这一技术意味着能够轻松构建出流畅的动画路径、高精度的CAD绘图工具或智能机器人的运动规划算法。
为什么选择Catmull-Rom实现路径平滑
在探讨具体代码之前,理解其背后的数学逻辑至关重要,Catmull-Rom是一种插值样条,属于C1连续(位置和一阶导数连续)的曲线,这意味着在连接点处,曲线不仅位置重合,切线方向也一致,从而消除了视觉上的“折角”。
业内专家指出,在实时渲染和游戏开发中,Catmull-Rom的计算效率远高于高阶多项式插值,且视觉效果极佳,与B样条或NURBS相比,它的局部控制特性更加直观:修改一个控制点,只会影响相邻的两段曲线,而不会像贝塞尔曲线那样牵一发而动全身,这种特性使得它在需要动态调整路径的场景中极具优势。
与贝塞尔曲线的核心差异对比
许多初学者容易混淆Catmull-Rom与贝塞尔曲线,以下是两者在实际应用中的关键区别:
- 控制点关系:贝塞尔曲线的控制点通常位于曲线外部,起到“牵引”作用,曲线本身不经过这些点(除了首尾点);Catmull-Rom的控制点即为曲线经过的点,直观易懂。
- 局部性:贝塞尔曲线受所有控制点影响,调整一点可能改变整条曲线形态;Catmull-Rom具有局部支撑性,调整某点仅影响邻近区间。
- 应用场景:贝塞尔更适合设计Logo或字体轮廓;Catmull-Rom更适合轨迹规划、地形生成等需要精确经过特定点的场景。

Python实现Catmull-Rom样条的实操步骤
在Python生态中,实现Catmull-Rom样条主要有两种方式:使用成熟的科学计算库scipy,或者从零开始编写算法以深入理解原理,对于大多数工程应用,推荐优先使用scipy,因为它经过高度优化且稳定性强。
基于Scipy的高效实现方案
scipy.interpolate库提供了CubicSpline,但默认情况下它生成的曲线不一定经过所有数据点(取决于边界条件),为了实现严格的Catmull-Rom插值,我们需要手动构造张力矩阵或使用专门的库如catmull-rom,通过调整CubicSpline的边界条件,或者使用make_interp_spline,可以近似达到效果,更直接的方式是使用第三方库interpolatedunif或自定义函数。
以下是一个基于标准Catmull-Rom公式的通用实现逻辑,适用于任何版本Python:
- 准备控制点:确保输入是一组二维或三维坐标点列表。
- 计算张力参数:通常使用均匀参数化,即相邻点之间的参数差值为1。
- 迭代生成中间点:对于每一段曲线,利用当前点、前一点、后一点和再后一点,计算该段曲线上的密集采样点。
import numpy as np
import matplotlib.pyplot as plt
def catmull_rom_spline(points, num_points=100):
# 将点转换为numpy数组以便计算
pts = np.array(points)
# 复制首尾点以处理边界情况
pts = np.vstack([pts[0], pts, pts[-1]])
# 初始化结果数组
result = []
# 遍历每一段曲线
for i in range(len(pts) - 3):
p0 = pts[i]
p1 = pts[i+1]
p2 = p
ts[i+2]
p3 = pts[i+3]
# 生成该段曲线上的点
t = np.linspace(0, 1, num_points)
# Catmull-Rom公式
t2 = t2
t3 = t3
term1 = 0.5 ((2p1) + (-p0+p2)t + (2p0-5p1+4p2-p3)t2 + (-p0+3p1-3p2+p3)t3)
result.append(term1)
return np.vstack(result)

安装与依赖管理
在实际项目中,建议通过pip安装必要的依赖库,对于需要高性能计算的场景,numpy是基础;对于可视化,matplotlib或pyqtgraph是不错的选择。
- 安装命令:
pip install numpy matplotlib scipy - 若需更高级的3D支持,可考虑安装
pyvista或open3d。
不同场景下的性能优化策略
当控制点数量达到数千甚至数万级别时,实时计算Catmull-Rom曲线可能会成为性能瓶颈,需要根据具体场景采取不同的优化策略。
静态路径预计算
在游戏地图编辑器或离线渲染中,路径通常是固定的,最佳实践是在初始化阶段一次性计算出所有采样点,并将结果存储在内存数组或文件中,运行时只需读取预计算的数据,避免重复计算,这种方法可以将渲染帧率提升数个数量级,尤其适用于移动端设备。
动态实时插值
在机器人导航或实时物理模拟中,控制点可能会动态变化,应避免重新计算整条曲线,Catmull-Rom的局部性特性允许我们仅重新计算受影响的相邻曲线段,可以使用缓存机制,记录上一次计算的结果,仅当控制点移动超过阈值时才触发重新计算。
常见问题与解决方案
如何处理曲线闭合问题
在实现环形路径或闭合图形时,首尾点的连接处容易出现断裂或不平滑,解决方法是将控制点列表进行循环扩展,即把最后几个点复制到列表头部,把最前几个点复制到列表尾部,从而构造出虚拟的控制点,对于点集[A, B, C, D],闭合处理后的点集可视为[D, A, B, C, D, A],这样在计算A到B的曲线时,就能利用D和C作为前驱点,确保连接处的切线连续。

Catmull-Rom在Python中的价格与开源协议
许多开发者关心使用Catmull-Rom算法的成本,该算法本身是数学公式,不存在授权费用,Python中的相关库,如scipy和numpy,均采用BSD或MIT等宽松开源协议,可自由用于商业项目,市面上虽有封装好的商业图形引擎(如Unity或Unreal的插件),但Python原生实现完全免费,据工信部相关数据显示,开源软件在工业级应用中的采纳率逐年上升,主要得益于其零许可成本和高度可定制性。
Q&A:关于Catmull-Rom Python实现的常见疑问
Catmull-Rom Python实现是否支持3D空间路径规划?
完全支持,Catmull-Rom算法本质上是基于向量运算的,因此天然支持多维空间,在Python中,只需将控制点定义为包含x, y, z坐标的元组或数组,算法会自动对每个维度独立进行插值计算,这对于无人机飞行路径规划、3D打印机的移动轨迹生成等应用至关重要。
与B样条相比,Catmull-Rom在Python中的计算速度如何?
在控制点数量较少(小于100个)时,两者的计算速度差异微乎其微,均在毫秒级,当控制点数量增加时,Catmull-Rom由于具有局部支撑性,仅涉及少量点的矩阵运算,其计算复杂度相对较低且稳定,B样条虽然灵活性更高,但在某些实现中可能涉及更复杂的基函数计算,多数情况下,对于实时性要求高的应用,Catmull-Rom因其简单的公式结构而略占优势。
如何解决Catmull-Rom曲线在尖锐转角处的过冲问题?
Catmull-Rom曲线在控制点形成锐角时,可能会出现曲线超出控制点范围的现象,即“过冲”,解决这一问题的方法包括:调整张力参数(Tension Parameter),引入非均匀参数化(Chord Length或Centripetal参数化),或者在算法后处理阶段对曲线进行裁剪和平滑处理,采用Centripetal参数化通常能有效减少过冲,使曲线更加贴合控制点形成的多边形形状。
首发原创文章,作者:世雄 - 原生数据库架构专家,如若转载,请注明出处:https://idctop.com/article/461007.html