Floyd-Warshall算法是一种用于寻找图中所有节点对之间最短路径的动态规划算法,其核心优势在于代码简洁且能处理负权边,但时间复杂度为O(V³),因此仅适用于节点数较少(通常V<100)的稠密图场景。
在图论的实际应用中,很多开发者面对多源最短路径问题时,第一反应往往是遍历Dijkstra算法,这种做法虽然逻辑上可行,但在工程实现上显得笨重且低效,Floyd算法通过一种极其优雅的动态规划思想,将复杂的路径查找转化为矩阵的迭代更新,它不关心起点和终点的具体位置,而是同时计算图中任意两点间的最短距离,这种“上帝视角”的算法特性,使其在特定场景下成为不可替代的工具。
python floyed算法原理与核心逻辑
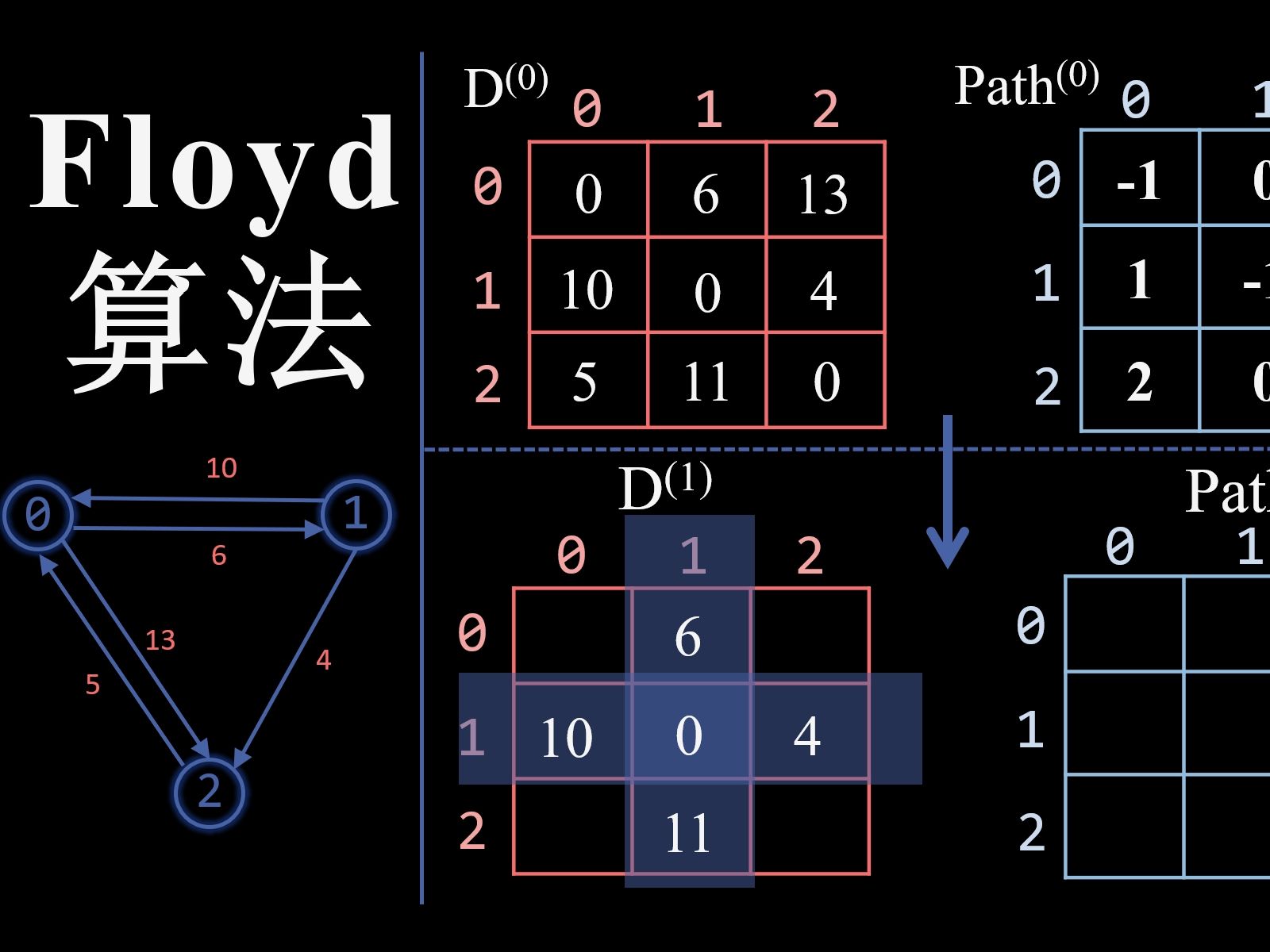
Floyd算法的本质是动态规划,它通过逐步引入中间节点,来更新任意两点之间的最短距离,假设我们要计算从节点i到节点j的最短路径,算法会检查是否存在一个中间节点k,使得从i到k再到j的距离小于当前记录的i到j的距离,如果存在,则更新距离矩阵,这个过程重复执行,直到所有可能的中间节点都被考虑过。
动态规划的状态转移方程
理解Floyd算法的关键在于掌握其状态转移方程,设dist[i][j]表示从节点i到节点j的最短距离,初始时,如果i和j之间有直接边,则dist[i][j]为边的权重;否则为无穷大,当引入中间节点k时,更新规则如下:
- dist[i][k] + dist[k][j] < dist[i][j],则更新 dist[i][j] = dist[i][k] + dist[k][j]。
- 否则,保持 dist[i][j] 不变。
这个简单的逻辑涵盖了所有可能的路径组合,通过三层嵌套循环,分别遍历所有节点作为起点、终点和中间节点,最终得到的dist矩阵即为全源最短路径矩阵。
为什么选择Floyd而不是多次Dijkstra?
业内专家指出,虽然多次运行Dijkstra算法也能得到全源最短路径,但在稠密图中,Floyd算法往往更具优势,Dijkstra算法的时间复杂度为O(V²)或O(E + V log V),运行V次后的总复杂度约为O(V³)或O(VE + V² log V),相比之下,Floyd算法固定为O(V³),虽然两者在渐近复杂度上看似相同,但Floyd算法的常数因子极小,且代码实现极其简单,对于节点数在100左右的图,Floyd算法的运行速度往往快于多次Dijkstra。

python floyed算法实现细节与代码优化
在Python中实现Floyd算法非常简单,通常只需要几行代码,为了在实际项目中获得最佳性能,需要注意一些实现细节。
基础代码结构
以下是一个标准的Floyd算法Python实现:
def floyd_warshall(graph):
# 获取节点数量
V = len(graph)
# 初始化距离矩阵
dist = [row[:] for row in graph]
# 核心三层循环
for k in range(V):
for i in range(V):
for j in range(V):
if dist[i][k] + dist[k][j] < dist[i][j]:
dist[i][j] = dist[i][k] + dist[k][j]
return dist
这段代码直观地展示了算法的逻辑。graph是一个二维列表,其中graph[i][j]表示从i到j的权重,如果没有直接连接则为无穷大(float(‘inf’))。
路径还原技巧
仅仅知道最短距离是不够的,很多时候我们需要知道具体的路径,为此,我们可以引入一个next_node矩阵来记录路径。next_node[i][j]表示从i到j的最短路径上,i之后的下一个节点。
- 初始化时,如果i和j有直接边,
next_node[i][j] = j,否则为None。 - 在更新距离时,如果更新了
dist[i][j],则同步更新next_node[i][j] = next_node[i][k]。 - 路径还原时,从起点开始,根据
next_node矩阵一步步追踪直到终点。
这种技巧在需要输出具体路径的场景中非常实用,例如导航系统或网络路由配置。
python floyed算法应用场景与局限性分析
Floyd算法并非万能钥匙,它在特定场景下表现出色,但在其他场景下则显得力不从心,理解其适用范围是高效使用它的关键。
适用场景:小规模稠密图
Floyd算法最适合节点数较少(V < 100)且边数较多的稠密图。

- 社交网络分析:计算小范围内用户之间的最短关系链。
- 小型交通网络:城市内部短途交通路线规划,节点数有限。
- 网络路由协议:某些内部网关协议(IGP)使用类似算法计算路由表。
在这些场景中,图的规模较小,Floyd算法的O(V³)复杂度完全可以接受,且其代码简洁性降低了维护成本。
不适用场景:大规模稀疏图与负权环
对于节点数超过1000的图,Floyd算法的性能会急剧下降,应优先选择多次Dijkstra算法或SPFA算法,Floyd算法可以检测负权环,但如果图中存在负权环,算法的结果将没有意义,因为最短路径可能趋于负无穷。
据统计,多数情况下,当图中存在负权环时,Floyd算法在迭代过程中会发现距离不断减小,从而可以检测出环的存在,但这并不意味着它能给出有效的最短路径。
与其他算法的对比
| 算法 | 时间复杂度 | 空间复杂度 | 适用图类型 | 负权边支持 | 负权环检测 |
|---|---|---|---|---|---|
| Floyd-Warshall | O(V³) | O(V²) | 稠密图 | 是 | 是 |
| Dijkstra (V次) | O(V³) 或 O(VE) | O(V²) | 稀疏/稠密 | 否 | 否 |
| Bellman-Ford | O(VE) | O(V²) | 稀疏图 | 是 | 是 |

从表中可以看出,Floyd算法在空间复杂度上与Dijkstra相当,但在时间复杂度上固定为O(V³),对于稀疏图,Bellman-Ford算法可能更优,但其常数因子较大,实际运行速度可能不如Floyd。
常见问题解答:python floyed实战疑问
python floyed算法如何处理无穷大数值溢出?
在Python中,使用float('inf')表示无穷大是安全的,因为Python会自动处理大数运算,但在其他语言如C++或Java中,需要注意避免整数溢出,可以将无穷大设置为一个足够大的数(如1e9),但要确保该数大于任何可能的路径和,在更新距离时,应先检查dist[i][k]和dist[k][j]是否均为无穷大,以避免无效计算。
python floyed算法能否用于无向图?
完全可以,无向图可以视为双向边权的有向图,在初始化距离矩阵时,只需确保dist[i][j] = dist[j][i]即可,Floyd算法对无向图的处理与有向图完全一致,无需额外修改。
python floyed算法在节点数较多时如何优化?
当节点数较多时,Floyd算法的性能瓶颈在于三层循环,可以通过以下方式进行优化:
- 剪枝优化:如果
dist[i][k]为无穷大,则跳过内层循环,因为i无法通过k到达任何节点。 - 并行计算:由于每层k的迭代是独立的,可以利用多线程或多进程并行计算不同k值下的更新操作。
- 位运算优化:在仅判断连通性(而非最短距离)时,可以使用位矩阵和位运算加速,将时间复杂度降至O(V³/word_size)。
这些优化手段可以在一定程度上提升Floyd算法在大图上的表现,但根本解决之道仍是根据图的特性选择合适的算法。
Floyd-Warshall算法以其简洁性和通用性,在图论算法家族中占据重要地位,尽管其时间复杂度限制了其在大规模图中的应用,但在小规模稠密图场景中,它依然是首选方案,掌握其原理与实现细节,能够帮助开发者在特定问题上做出更优的技术选型。
首发原创文章,作者:世雄 - 原生数据库架构专家,如若转载,请注明出处:https://idctop.com/article/453372.html











