Go语言凭借其高并发、部署简单和内存安全等特性,正在嵌入式开发领域崭露头角,为传统C/C++主导的领域带来了现代化的开发体验,下面是详细的Go嵌入式开发实战指南:
Go嵌入式开发环境与硬件准备
-
核心工具链选择
- TinyGo: 专为微控制器设计的Go编译器,支持众多ARM Cortex-M系列(如STM32系列、nRF52系列)、ESP8266/ESP32、Raspberry Pi Pico等,是Go嵌入式的主力。
- 标准Go编译器 + Cgo: 适用于运行Linux的嵌入式系统(如Raspberry Pi, BeagleBone),通过Cgo调用底层硬件驱动或C库。
- 安装TinyGo:
# Linux/macOS curl -fsSL https://raw.githubusercontent.com/tinygo-org/tinygo/main/scripts/install.sh | sh # Windows (Powershell) iwr https://raw.githubusercontent.com/tinygo-org/tinygo/main/scripts/install.ps1 -useb | iex
验证:
tinygo version
-
硬件平台选择 (示例)
- 入门友好: Arduino Nano 33 IoT (SAM D21 Cortex-M0+), Raspberry Pi Pico (RP2040), ESP32-DevKitC.
- Linux SBC: Raspberry Pi 3/4/Zero 2W, BeagleBone Black.
-
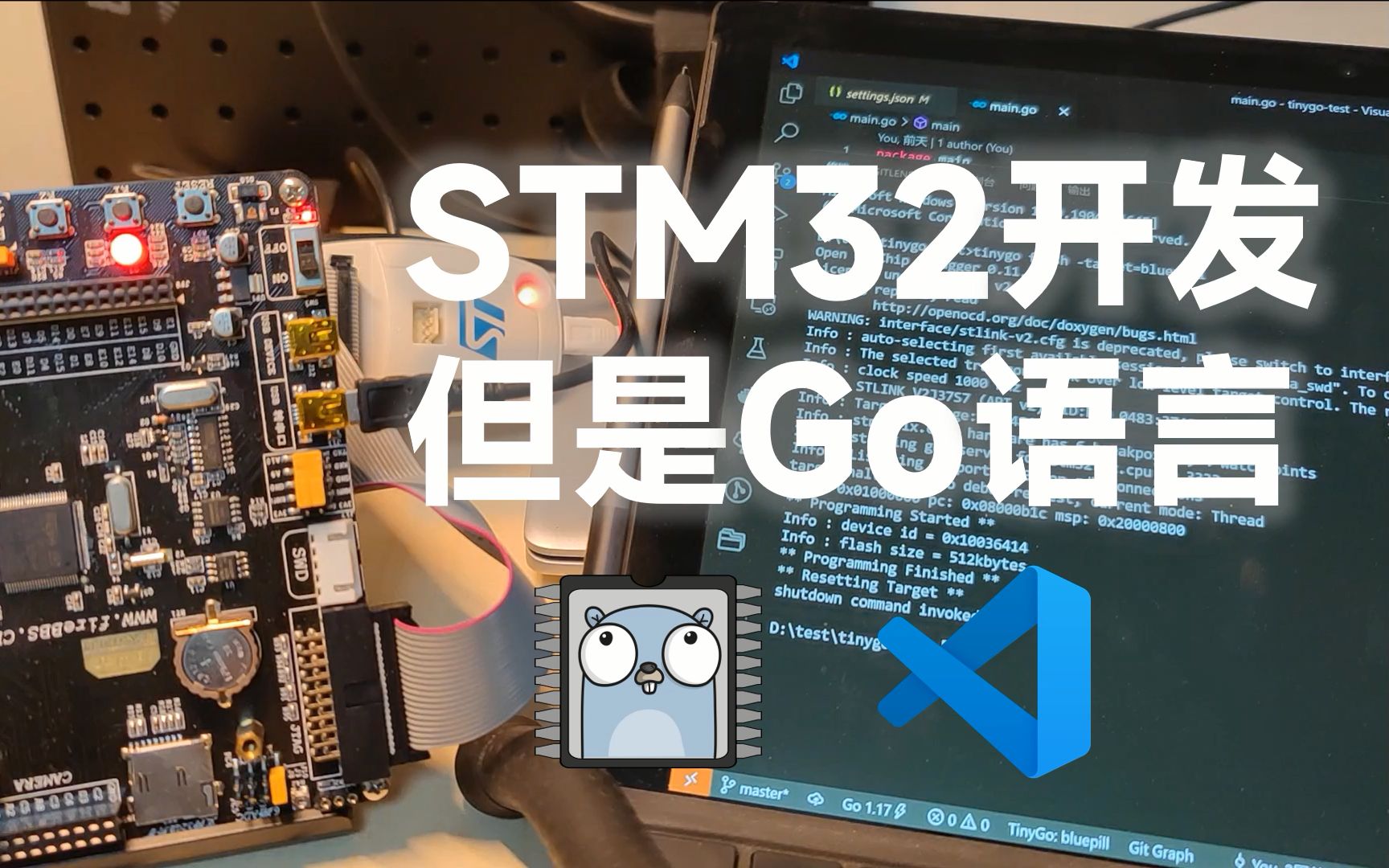
开发环境
 (图片来源网络,侵删)
(图片来源网络,侵删)- 代码编辑器: VS Code + TinyGo插件(提供智能提示、编译/刷写命令)。
- 硬件连接: USB数据线(供电/刷写/通信),可能需要串口调试工具(PuTTY, screen, minicom)。
- 依赖: 根据目标板,可能需要安装
avrdude,openocd,bossac等刷写工具(TinyGo通常集成或提示安装)。
基础实战:点亮你的第一盏灯 (GPIO控制)
以Raspberry Pi Pico为例,使用TinyGo控制板载LED。
-
编写代码 (
blink.go)package main import ( "machine" "time" ) func main() { // 定义LED引脚 (Pico板载LED连接在GPIO25) led := machine.LED // 配置引脚为输出模式 led.Configure(machine.PinConfig{Mode: machine.PinOutput}) // 无限循环:亮灭交替 for { led.High() // 输出高电平,LED亮 (Pico LED是低电平有效则用led.Low()) time.Sleep(500 time.Millisecond) led.Low() // 输出低电平,LED灭 time.Sleep(500 time.Millisecond) } } -
编译与刷写
(图片来源网络,侵删)- 连接Raspberry Pi Pico到电脑(按住BOOTSEL按钮再插入USB进入刷写模式)。
- 执行TinyGo刷写命令:
tinygo flash -target=pico blink.go
- 观察Pico板载LED开始闪烁。
核心外设与通信协议
-
UART (串口通信)
- 用于调试输出、与其他设备通信(如GPS模块)。
package main
import (
“machine”
“time”
)// 假设使用UART0, TX=GP0, RX=GP1 (根据板子实际引脚定义)
var uart = machine.UART0func main() {
uart.Configure(machine.UARTConfig{
BaudRate: 115200,
TX: machine.GP0,
RX: machine.GP1,
})for { uart.Write([]byte("Hello, Embedded World!rn")) time.Sleep(time.Second) }使用串口监视器查看输出。 - 用于调试输出、与其他设备通信(如GPS模块)。
-
I2C (Inter-Integrated Circuit)
- 连接传感器、显示屏等(如BME280温湿度气压传感器, SSD1306 OLED)。
package main
import (
“machine”
“time”
“tinygo.org/x/drivers/bme280”
)func main() {
machine.I2C0.Configure(machine.I2CConfig{
Frequency: 400 machine.KHz, // 标准400kHz
SCL: machine.GP5, // 根据板子定义
SDA: machine.GP4,
})sensor := bme280.New(machine.I2C0) sensor.Configure() // 通常需要配置模式、采样率等 for { temp, _ := sensor.ReadTemperature() // 摄氏度 press, _ := sensor.ReadPressure() // Pa hum, _ := sensor.ReadHumidity() // %RH // 处理或输出数据... time.Sleep(2 time.Second) } - 连接传感器、显示屏等(如BME280温湿度气压传感器, SSD1306 OLED)。
-
SPI (Serial Peripheral Interface)
- 用于高速通信(如TFT显示屏, SD卡, 某些无线模块)。
package main
import (
“machine”
“tinygo.org/x/drivers/ili9341”
)func main() {
machine.SPI0.Configure(machine.SPIConfig{
Frequency: 40 machine.MHz, // 根据设备能力调整
LSBFirst: false,
Mode: 0, // CPOL=0, CPHA=0
DataBits: 8,
SCK: machine.GP10,
SDO: machine.GP11, // MOSI
SDI: machine.GP12, // MISO (如果只输出可省略)
})display := ili9341.NewSPI( machine.SPI0, machine.GP13, // DC machine.GP14, // RESET machine.GP15, // CS ) display.Configure(ili9341.Config{}) display.FillScreen(ili9341.RED) // 测试屏幕 - 用于高速通信(如TFT显示屏, SD卡, 某些无线模块)。
-
ADC (模数转换)
- 读取模拟信号(如电位器、光照传感器)。
package main
import (
“machine”
“time”
)func main() {
sensorPin := machine.ADC{Pin: machine.ADC0} // 例如连接GP26 (ADC0)
sensorPin.Configure(machine.ADCConfig{})for { value := sensorPin.Get() // 返回uint16 (0-0xFFFF) voltage := float32(value) 3.3 / float32(0xFFFF) // 假设参考电压3.3V // 使用电压值... time.Sleep(100 time.Millisecond) } - 读取模拟信号(如电位器、光照传感器)。
-
PWM (脉宽调制)
- 控制LED亮度、电机速度、舵机角度。
package main
import (
“machine”
“time”
)func main() {
led := machine.LED
led.Configure(machine.PinConfig{Mode: machine.PinPWM})
pwm := machine.PWM{led}
pwm.Configure(machine.PWMConfig{Period: 1e6}) // 周期1mschannel, _ := pwm.Channel(led) // 获取PWM通道 brightness := uint32(0) up := true for { pwm.Set(channel, pwm.Top() brightness / 100) // 设置占空比 (0-100%) if up { brightness++ if brightness >= 100 { up = false } } else { brightness-- if brightness <= 0 { up = true } } time.Sleep(10 time.Millisecond) } - 控制LED亮度、电机速度、舵机角度。
进阶技巧与优化
-
中断处理 (Interrupts)
- 高效响应外部事件(按键、传感器触发)。
package main
import (
“machine”
)var button machine.Pin
func main() {
button = machine.GP15
button.Configure(machine.PinConfig{Mode: machine.PinInputPullup})
button.SetInterrupt(machine.PinFalling, func(p machine.Pin) { // 下降沿触发(按下)
// 中断服务程序(ISR) – 保持简短!
// 避免阻塞操作,通常设置标志位,在主循环处理。
})
select {} // 阻塞主程序,等待中断
} - 高效响应外部事件(按键、传感器触发)。
-
低功耗管理
- 对于电池供电设备至关重要,TinyGo提供
runtime包控制。import "runtime"
func main() {
// … 初始化外设 …
for {
// 执行任务…
runtime.WaitForEvents() // 进入低功耗模式,等待中断唤醒
// 或者
runtime.Sleep(time.Hour) // 睡眠指定时间 (支持程度看硬件)
}
} - 对于电池供电设备至关重要,TinyGo提供
-
内存管理优化
- 嵌入式资源有限,避免不必要的堆分配(逃逸分析),优先使用栈和全局变量,慎用
fmt(消耗大),使用更轻量的日志或strconv,利用TinyGo的-opt=z(启用更多大小优化)和-size=short编译选项查看大小。
- 嵌入式资源有限,避免不必要的堆分配(逃逸分析),优先使用栈和全局变量,慎用
-
与C/C++代码交互
- 在Linux SBC上或需要调用特定驱动时使用Cgo。
/ #include <some_library.h> / import "C"
func main() {
result := C.some_c_function(C.int(42)) // 调用C函数
}注意: Cgo在资源受限的微控制器上通常不可行(依赖libc等),主要用于Linux SBC。 - 在Linux SBC上或需要调用特定驱动时使用Cgo。
-
调试技巧
- 日志输出: UART是最基本有效的调试手段。
- GDB调试: TinyGo支持通过OpenOCD/SWD/JTAG进行硬件调试(需要调试探针)。
- Print Sizes:
tinygo build -size short -o out.elf -target=xxx program.go查看代码/数据段大小。 - 逻辑分析仪: 可视化GPIO、UART、I2C、SPI信号,排查硬件时序问题。
Go嵌入式的优势与挑战
- 优势:
- 并发简化: Goroutine和Channel让并发逻辑清晰易写,避免回调地狱。
- 内存安全: 减少缓冲区溢出、悬垂指针等常见C/C++安全问题。
- 部署便捷: 编译为单一静态二进制文件(在Linux SBC上),易于部署。
- 工具链现代: Go工具链(gofmt, go vet, go mod)提升开发效率和代码质量。
- 垃圾回收(GC): 简化内存管理(但需注意GC暂停时间对实时性的影响)。
- 挑战与考量:
- 实时性: GC暂停时间(尽管TinyGo GC非常轻量且可调)可能不满足硬实时需求。
- 内存占用: 相比极致优化的C代码,Go二进制和运行时占用稍大(但TinyGo已大幅优化)。
- 硬件支持广度: 虽然TinyGo支持广泛,但仍不及成熟的C/C++工具链覆盖所有芯片。
- 裸机开发成熟度: Go的嵌入式生态(驱动、RTOS集成)仍在快速发展中。
- 极致性能: 对时钟周期要求极其苛刻的场景,C/汇编仍是首选。
应用场景
- IoT设备网关/边缘节点(RPi, ESP32)
- 需要复杂网络/并发逻辑的嵌入式设备
- 数据采集与传感器融合系统
- 工业控制(非硬实时)
- 教育平台(安全、易学)
- 需要快速迭代和部署的原型开发
Go语言为嵌入式开发开辟了一条现代化、高效且安全的新路径,TinyGo编译器极大地降低了Go进入微控制器世界的门槛,虽然在某些极致场景下C/C++仍是王者,但Go在并发需求高、开发效率优先、安全性要求严格的中等复杂度嵌入式项目中展现出强大的竞争力,掌握Go嵌入式开发,意味着你将同时拥有云原生和边缘计算的能力栈。
你的Go嵌入式之旅开始了吗? 你正在使用或计划使用哪款开发板探索Go的硬件世界?是遇到了GPIO控制的挑战,还是在通信协议上卡了壳?或者你已经成功用Go驱动了某个炫酷的传感器或屏幕?欢迎在评论区分享你的项目经验、踩过的坑或者提出的疑问! 让我们共同推动Go在嵌入式领域的边界。
首发原创文章,作者:世雄 - 原生数据库架构专家,如若转载,请注明出处:https://idctop.com/article/22200.html